Работа на растяжение пружины
- Авторы
- Резюме
- Файлы
Иванов Е.М.
Показано, что работа растяжения пружины A>kxm2 , где k — жесткость пружины, xm — максимальное растяжение. При вычислении работы надо использовать значения x и dx, полученные из решения уравнения движения.
Показано, что работа растяжения пружины A>kxm2 , где k — жесткость пружины, xm — максимальное растяжение. При вычислении работы надо использовать значения x и dx, полученные из решения уравнения движения.
It is shown, that work of a stretching of a spring A>kxm2 , where k — rigidity of a spring, xm — the maximal stretching. At calculation of work it is necessary to use values x and dx, the equations of movement received from the decision.
Рассмотрим спиральную пружину, один конец которой закреплен (рис. 1а), а к другому прикреплен груз массой m. Если пружину растянуть или сжать, то возникает сила F, стремящаяся вернуть тело в положение равновесия. При небольших растяжениях x справедлив закон Гука — сила пропорциональна растяжению пружины: F = -kx. Постоянная k называется коэффициентом упругости, или жесткостью пружины. Знак минус означает, что сила F направлена в сторону, противоположную смещению x, т.е. к положению равновесия x = 0. Геометрически (рис. 1b) , k = tgβ, xm — максимальное (амплитудное) растяжение пружины.
В курсах физики утверждается, что работа при растяжении от x = 0 до xm будет равна
(1)
и эта работа равна потенциальной энергии пружины, растянутой (или сжатой) на величину xm и обладающей жесткостью k. Однако это одно из заблуждений классической механики. Растягивающей силой, равной F = kx, нельзя растянуть пружину даже на долю микрона. Чтобы растянуть пружину, надо приложить растягивающую силу в виде (F1 + k1x ), где F1 >0 (рис. 2а). Уравнение движения (II закон Ньютона) запишем в следующем виде:
(2)
Решение при нулевых начальных условиях (при t = 0, x =0 и V =0) имеет вид
Из решения следует, что если F1 =0, то растяжения пружины не происходит. Амплитудные значения (при x = xm):
Работу вычисляем по формуле , где F = F1 — (k — k1)x, а x и dx определяются из выражений (3) и (4). Работа, совершаемая растягивающей силой
(5)
Работа, совершаемая силой упругости пружины
(6)
Из соотношения (5) следует, что работа, совершаемая растягивающей силой, не зависит от величин F1 и k1 и равна работе
(5а)
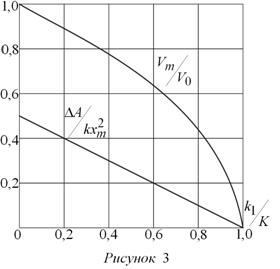
совершаемой постоянной силой F0, при этом работа, совершаемая силой упругости пружины A-0 = -kxm2 разность работ ΔA0 = kxm2 / 2 , конечная скорость при x = xm На рис. 3 даны графики зависимостей Vm / V0 и ΔA = kxm2 от величины отношения K1 / K. ΔA — кинетическая энергия груза.
Рассмотрим случай растягивающей силы FP > F0 (рис.2b) FP = F2 + k2x = F2 — b2x , где b2 = -k2 = tgα. Дифференциальное уравнение движения имеет вид:
(7)
Его решение при нулевых начальных условиях имеет вид:
; (8)
(9)
Амплитудные значения (при x = xm): xm = F2 / mω2; ; .
Работа, совершаемая растягивающей силой
(10)
Работа, совершаемая силой упругости пружины
(11)
Кинетическая энергия груза при x = xm
(12)
На рис. 4 даны графики изменения безразмерных комплексов ΔA / kxm2 и Vm / V0 в зависимости от величины отношения k2 / k.
Рассмотрим третий способ растяжения пружины с грузом (рис. 2с). Прикладываем растягивающую силу Fa >>F0 для растяжения пружины на некоторое расстояние xa, затем сила Fa отключается, а оставшийся отрезок пути, равный xm — xa, груз проходит по инерции, используя запас кинетической энергии Ka, приобретенный в точке xa. Для первого участка пути дифференциальное уравнение имеет вид
(13)
Его решение при нулевых начальных условиях:
; (14)
(15)
Время движения до x = xa
(16)
Работу вычисляем по формуле , где F(x) = Fa — kx, а x и dx определяются выражениями (14) и (15). Работа растяжения на участке до x = x0
(17)
Работа, совершаемая силой упругости пружины на этом же участке
(18)
Кинетическая энергия, приобретенная грузом:
(19)
Для второго участка уравнение движения имеет вид
(20)
Начальные условия для этого уравнения примем в виде: при t = 0 координата x = xa, скорость Va определяется выражением (15) при t = ta. Решение будет иметь вид:
(21)
(21a)
Работа силы упругости пружины на участке от x = xa до xm определится интегралом , где x и dx определяются выражениями (21) и (21а):
(22)
где tm ─ время движения груза от x=xa до x = xm. Условием достижения этой точки является равенство начальной кинетической энергии Ka работе силы упругости пружины A2. Это равенство сводится к трансцендентному уравнению
(23)
где a = kxa2 / 2; b = Ka — a; c = kxaVa / 2ω; φ = ωtm.
Приведем численный пример. Груз массой m = 1 кг, прикрепленный к пружине с жесткостью k = 400 Н/м, растягивается силой F0 = 80 Н на расстояние xm = 0,2. Работа силы растяжения Дж, работа силы упругости пружины Дж, время t = 0,0785 с.
Проведем растяжение силой Fa по схеме, показанной на рис. 2с. Расчет сведем в таблицу 1.
Таблица 1.
Fa [H] | Ka [Дж] | ta [c] | xa [м] | A+ [Дж] | A- [Дж] | tm [c] |
8000 | 8 | 0,0005 | 0,001 | 16 | -8 | 0,078 |
800 | 7 | 0,00468 | 0,00876 | 14,015 | -7,015 | 0,0762 |
200 | 6 | 0,0176 | 0,0309 | 12,19 | -6,19 | 0,0696 |
80 | 3,75 | 0,0377 | 0,054 | 8,088 | -4,338 | 0,0597 |
Таким образом, только в случае растяжения пружины с грузом по схеме, показанной на рис.2с, можно затратить работу на растяжение A+, близкую к потенциальной энергии растянутой пружины П = kxm2 / 2.
Библиографическая ссылка
Иванов Е.М. РАБОТА ДЕФОРМАЦИИ ПРУЖИННОГО МАЯТНИКА // Современные наукоемкие технологии. – 2007. – № 3. – С. 15-19;
URL: https://top-technologies.ru/ru/article/view?id=24676 (дата обращения: 23.01.2021).
Предлагаем вашему вниманию журналы, издающиеся в издательстве «Академия Естествознания»
(Высокий импакт-фактор РИНЦ, тематика журналов охватывает все научные направления)
Источник
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.
Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.
Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.
Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.
Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.
Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений
Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.
Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Источник
Пружины растяжения навивают почти всегда вплотную или даже с натягом между витками, достигаемым смешением проволокопитателя навивочного автомата по отношению к навиваемым виткам (пружины с межвитковым давлением).
Концы пружин снабжают зацепами, с помощью которых ее соединяют со стягиваемыми деталями. В отличие от пружин сжатия, нуждающихся в жестком направлении торцов, пружины растяжения работают в свободном состояния, центрируясь только точками опоры (завеса). Крепление зацепами обладает шарнирным свойством, благодаря чему пружина может при растяжении менять пространственное положение в значительных пределах. Это делает пружины растяжения особенно удобными для соединения деталей, угловое положение которых изменяется при работе, например, для завеса рычагов (рис. 891, I, II).
Однако крепление зацепами обладает недостатками. Габаритная длина пружины растяжения за счет зацепов всегда больше, чем пружин сжатия одинаковой гибкости. Зацепами трудно обеспечить центральное приложение нагрузки; пружина подвергается дополнительным изгибающим нагрузкам, а в самих зацепах возникают высокие напряжения изгиба, которые могут привести со временем к появлению остаточных деформаций. Вследствие деформации зацепов и участков перехода зацепов в спираль пружина вытягивается и теряет упругие характеристики. Пружины растяжения могут работать без потери упругих свойств только при пониженных расчетных напряжениях.
По этим причинам пружины растяжения почти никогда не применяют в ответственных силовых механизмах (циклического действия). Пружины сжатия в этих условиях обеспечивают и меньшие габариты, и большую надежность работы.
В случаях, когда по условиям работы упругий элемент должен растягиваться с изменением своего пространственного положения, нередко применяют установку пружин сжатия с реверсорами (рис. 892, I, II, III). Пружины такого типа, однако, малопригодны для механизмов высокочастотного циклического действия, так как масса реверсоров вызывает дополнительные инерционные нагрузки.
Применяемые конструкции зацепов показаны на рис. 893. Наиболее простые способы изготовления зацепов — отгибание половины витка (рис. 893, I, II), целого витка (рис. 893, III, IV) или полутора—двух витков (рис. 893, V) — применяют для неответственных, слабонагруженных пружин, так как зацепы такого вида подвержены изгибу. Также подвержены изгибу и петлевые зацепы (рис. 893, VI—VIII), кроме того, их изготовление значительно сложнее. Несколько прочнее зацепы с концами, заведенными в спираль пружины (рис. 893, IX, X).
Легкие пружины из проволоки малого диаметра крепят в пластинках с отверстиями под витки (рис. 893, XI—XIII). В зацепах этого типа необходимо устранить самовыворачивание пружины из отверстий, а также смещение пластинки с плоскости симметрии пружины, что конструктивно не так просто выполнить.
Иногда пружины устанавливают на ввертных резьбовых пробках (рис. 893, XIV—XVI) с фиксацией конечных витков завальцовкой (рис. 893, XV) или расклепыванием ниток пробки (рис. 893, XVI). В конструкциях этого типа крайне неблагоприятны условия работы витка, сходящего с последней нитки резьбовой пробки; виток работает на излом и избежать этого явления невозможно, если даже свести последнюю нитку на нет или заправить резьбу на конус.
Аналогичное явление происходит в конструкции с закладной пробкой, передающей силу на последний виток пружины, свернутый в кольцо малого диаметра (рис. 893, XVII).
Наиболее равномерную передачу сил на витки обеспечивает заправка конечных витков на конус с отгибом последнего витка на зацеп (рис. 893, XVIII, XIX) или с применением закладных зацепов (рис. 893, ХX—XXII). Изготовление таких пружин, однако, затруднительно, особенно при закладных зацепах, когда навивка конусного конца пружины должна производиться при заранее установленном в пружине зацепе.
Из представленных на рис. 893 конструкций наибольшей прочностью отличается конструкция с коническим зацепом (рис. 893, XXXII). Конус зацепа следует (с учетом упругих деформаций конечных витков) делать несколько более пологим, чем внутренний конус витков.
Пружины растяжения рассчитывают по тем же формулам, что и пружины сжатия. Наличие изгибающих напряжений в зацепах и витках пружины (при внецентренном приложении нагрузки) учитывают снижением расчетных напряжений в 1,2—1,5 раза по сравнению с напряжениями, допускаемыми для пружин сжатия центрального нагружения.
На рис. 894 изображена характеристика пружины растяжения. На рис. 895 показана характеристика пружины с начальным натяжением (пружины с межвитковым давлением).
Длина рабочей части пружины растяжения определяется из выражения
где i — число рабочих витков.
Длина рабочей части пружины в растянутом состоянии
где λ — упругое перемещение пружины.
Длина развертки пружины
где α — угол подъема витков
Lз — развернутая длина зацепов. Приближенно можно считать, что
Пружины растяжения обычно устанавливают с предварительным натягом, обеспечивающим замыкание стягиваемых деталей на упор в начальном положении. Сила предварительного натяга определяется условиями работы механизма. Шаг витков в состоянии предварительного натяга делают не меньше 1,5—2 диаметров проволоки с учетом возможности вытяжки зацепов в эксплуатации.
При растяжении диаметр пружины несколько уменьшается вследствие увеличения угла наклона витков.
Источник